
Neato XV Signature Pro porszívó robot teszt
Tapasztalatok
Mivel a Neato XV Signature Pro doboza nem tartalmaz sok különböző alkatrészt, a robot üzembehelyezése nem egy bonyolult feladat. Be kell rakni a felesleges kábelt és az adaptert a dokkóba, be kell dugni a dokkolót a konnektorba és oda kell tenni elé a robotot tölteni. Ha a Start gomb mellett lévő lámpa már folyamatosan zöldeni világít, akkor a gomb lenyomásával indítható a takarítás.

A robot a dokkolóból viszonylag hirtelen jön ki, de meg is áll előtte néhány másodpercre. Ezalatt a vákuum motor felpörög és olyan hangot ad, mintha éppen fel akarna szállni. Az ember csak várja, hogy hol van a vége, de sokkal tovább kell várni, mint elsőre gondolnánk. Eközben már forog a lézer szkenner is, így a készülék kezdi kiismerni a környezetét.

Ha a szívómotor már teljes fordulatszámon megy és lefutott az összes ellenőrzés is, akkor a robot elfordul egy kicsit, hogy a távolságokat néhány kontroll méréssel is ellenőrizze (a lézerszkenner nem a forgáspont közepén van, így az elfordulással egy másik pontból is el tudja végezni a méréseket), majd elindul a dokkolóval átellenes fal felé. Amennyiben eléri azt, akkor amellett elindul balra, majd a fal mentén, vagy ha olyan a helyiség fomája, akkor azon belül egy négyzet alakú területet lerajzolva körbe megy, majd visszatér a dokkolóhoz. Ezzel kijelölte és feltérképezte az első takarítandó blokkot, amin belül ezután párhuzamos csíkokat bejárva dolgozik.

Az azonnal feltűnik, hogy a Neato talán a leglassabb az összes robot között. Egyrészt nincs hova rohanjon, másrészt a kisebb sebességnél a motor valószínűleg kevesebbet fogyaszt, harmadrészt ha tovább marad egy adott ponton, akkor nyilván jobb a takarítás minősége is.
A minőséggel nincs is gond. Kemény padlóról tökéletesen összeszedi a koszt. Ahol jár ott tényleg pormentes lesz a padló. Érdekes látni, ahogy a porcicák még a robot mellől is a készülék alá ugranak, mert olyan erős a szívóhatás. Persze a fal és bútorok mellé szóródott homokot vagy egyéb masszívabb port már nem tudja összeszedni, de ameddig a henger szélessége elér, ott szépen felszed mindent. A legnagyobb gond így a falak és bútorok mentén van. Ott nem takarít fel szépen, de mivel mindenütt máshol tisztaság van, így a falak mentén sem rakódik le nagy kosz, elég néha napján végigtörölni vagy porszívózni.

A sarkok kezelése szintén érdekes. Kézenfekvő lenne, hogy a fal mentén haladva a sarokig menjen, majd onnan picit kitolatva forduljon el. Egészen a legutóbbi szoftverfrissítésig a robot úgy kezelte a sarkokat, minha azok le lennének kerekítve. Meg sem próbált bemenni, de a pozitív sarkokat is elég nagy ívben kerülte. A legújabb szoftver ezen sokat javít, de oldalkefék nélkül továbbra sem teljes a mutatvány.
Takarítás minőségét tekintve mi kemény padlón és kevéske rövid szőrű szőnyegen nem vettünk készre különbséget a kétfajta henger között. A zajszint viszont nagyon eltérő. A gumilapátok nagyon zajosak tudnak lenni, ahogy a padlóhoz csapódnak (79 dB), de halk ettől függetlenül a kefés hengerrel sem lesz a Neato (68 dB). A gumilapátos henger előnye, hogy sokkal kevésbé gyűjti magára a hajszálakat, mint a kefés henger. Ez utóbbiról időnként le kell vadászni a hajszálakat, de közel sem annyira vészes a helyzet, mint mondjuk a Roomba esetén. Jól látszik, hogy az óriási szívóerő itt is megteszi a hatását, mert még azelőtt beszívja a hajszálak többségét a tartályba, hogy azok fel tudnának tekeredni a hengerre.
Szpot módban 1,2×1,8 méteres téglalapon takarít fal úgy, hogy okos módon ennek a területnek a széléről indul. Teljesen logikus, hogy ha valahol kiszóródik valami, akkor nem a közepére akarjuk betenni a robotot, hanem a szélről küldjük csatába. A téglalapot a navigációnak hála a robot úgy is tőkéletesen tartja, ha abba fal vagy bútorok lógnak.
Navigáció terén a Neato zseniális. Induláskor és új területre érve az akadályokat a lézer első fordulatakor csak „ceruzával” rajzolja be, majd minden egyes fordulatnál áthúzza az akadályok körvonalát. Ha a következő fordulatnál az akadály nincs ott, akkor halványabbra radírozza az adott vonalat, majd néhány kör után teljesen eltünteti. Így oldja meg, hogy az olyan mozgó akadályok, mint az emberek vagy állatok ne maradjanak rajta több helyen is feleslegesen a térképen, blokkolva egy-egy területet.
A Neato XV Signature Pro nem lepődik meg akkor sem, ha egy széket munka közben arrébb teszünk, hiszen a fentebb vázolt technikával gyorsan elfelejti a régi és megtanulja az új pozíciót. A szoba teljes átrendezése azonban beteheti a kaput, hiszen a szabad terek formájából és méretéből tudja megállapítani, hogy éppen hol van és milyen irányban áll. Ha ezek olyan mértékben megváltoznak, hogy már nem ismeri fel a környezetét, akkor sajnos leáll. Ezt például olyannal is elő lehet idézni, hogy ha mondjuk az étkezőben az asztalra feltett székeket még a takarítás vége előtt lepakoljuk, miközben a dokkolóra visszatérő robotnak még át kell mennie a helyiségen.
Az elakadás egyébént a robot egyik legidegesítőbb tulajdonsága. Persze az elakadások egy része emberi mulasztásra vezethető vissza. Amikor a gyerekek valahol szétszórva hagynak apróságokat, vagy egy szülinapi buli után tele a ház lufikkal és a földön lógó madzagjaikkal, akkor azért nem korrekt a robotot hibáztatni. De sajnos gyakran előfordul olyan is, hogy valami miatt úgy dönt, hogy ő nem talál vissza a dokkolójába, vagy épp a dokkoló előtt állva jelenti ki, hogy ő nem találja azt. Az ilyen helyzetek jól mutatják a térképezős robotok óriási hiányosságát: ha valami miatt elvesztik a pozíciójukat a már meglévő térképen, akkor ott vége a dalnak. Meg sem próbáljnak újra elindulni és egy beazonosítható helyet keresni, vagy egy új térképet kezdeni, majd azt a régivel összevetve kitalálni, hogy hol vannak. Ezen persze a jövőben biztosan fognak a gyártók javítani, de egyelőre itt tartunk. Ezzel szemben egy véletlenszerűen mozgó robot nem esik kétségbe, ha nem találja a dokkolót, hiszen eddig sem tudta, hogy hol van. Keresi tovább, amíg le nem merül vagy meg nem találja.

A navigáció kapcsán számunkra érthetetlen, hogy miért ragaszkodik a robot pontosan az eredetileg kitalált blokkok méretéhez. Ha ugyanis úgy esik egy blokk, hogy az mondjuk az egyik fal mellett 30 cm híján lefedi a szoba teljes egészét, akkor a robot azt a 30 cm-t nem vonja be a blokkba, hanem először végez az eredeti területtel, majd utána megy csak a kimaradt területre. Ez így leírva ezen a példán talán nem lényeges, de adódhatnak olyan esetek, ahol ez a stratégia felesleges várakozásra készteti a lakókat. A robot a lézernek hála pedig tudja, hogy ott már csak egy 30 cm-es sáv maradt ki, ennek ellenére nem tud túllépni az előre kitalált blokk határokon.
A robot egy feltöltéssel nagyjából egy órát üzemel. Persze csak akkor, ha minden rendben van. Nálunk ez már a második Neato robot volt, és ez is az elsőhöz hasonló problémával érkezett. A gond az volt, hogy egy feltöltéssel a robot mindössze 40 percet volt hajlandó takarítani, ami azt jelentette, hogy egy kb. 80 m2> terület kitakarítása 2, vagy akár 3 külön takarítási ciklust is jelentett. A ciklusok között vissza kellett mennie a töltőre, 40-50 percet töltenie kellett, így ennek a területnek a kitakarítása 2,5-3 órát is igénybe vett. A probléma észlelésekor megkerestük az ügyfélszolgálatot, de sajnos nem tudtak segíteni, a vége az lett, hogy küldtek egy új szett akkumulátort, amivel a robot pont ugyanúgy működött. A hiba tehát nem az akkumulátorokban keresendő, sokkal inkább a töltő és akkukezelő áramkör butaságában.
A megoldást az akku kisütésében találtuk meg. Ha az akkumulátort a biztonságos szintig lemerítjük, majd úgy tesszük be a robotba (és a menüben jelezzük, hogy új akkut kapott), akkor az így feltöltött akkumulátorral a készülék már egy bő órán keresztül működik, ami szerencsés esetben elegendő a 80 m2-es szint kitakarítására.
A szisztematikus takarítás óriási előnye egyébként, hogy ha a robot egy feltöltéssel nem képes végigtakarítani a teljes területet, akkor töltés után ott tudja folytatni a takarítást, ahol előzőleg abbahagyta. Így válik lehetővé nagyobb területek takarítása virtuális falak és kapuk nélkül is.

A dokkolóra a Neato XV Signature Pro akkor is visszatalál, ha történetesen nem a dokkolóról indult el. Ennek persze az a feltétele, hogy a dokkolóval találkozzon a takarítás alatt, és azt ne mozdítsuk el onnan. A dokkolóban ugyanis nincs jeladó, mindössze egy speciális fényvisszaverő réteg szolgál az azonosítására. A dokkolás az esetek nagy részében tökéletesen megtörténik, és a robot arra is odafigyel, hogy ha valaki arrébb löki, akkor visszaálljon a dokkolóra.
A robot a hét minden napjára külön időzíthető, de kérhető az adott nap kihagyása is. Nálunk gyakran használt funkció a teljes időzítés kikapcsolása is, amivel minden olyan esetben felfüggeszthető a robot működése, amikor várhatóan nem leszünk itthon (egyébként beindítja a mozgásérzékelős riasztót).


A Neato XV Signature Pro robot az egyik legkevésbé karbantartásigényes robot a piacon. A gumilapos hengerre negyon kevés hajszál tekeredik fel, de a kefés hengert sem kell havi egy alkalomnál gyakrabban takarítani még két hosszúhajú nő mellett sem. Az egyetlen kényes dolog a portartály, ami jókora mérete ellenére gyorsan megtelik, és erre idegesítő csipogással figyelmeztet is.



Bár elsőre jónak tűnik a portartály ürítésre kitalált rendszer, összességében egy kényelmetlen megoldás, pláne az új HEPA szűrővel. A korábbi lapos szűrőt kivéve a kosz nagy része kiönthető volt a tartályból és leszórható a szűrőről. A hullámos HEPA szűrőről azonban nem válik le a kosz, amihez a tartályban lévő szemét egy része is csatlakozik. Így vagy kézzel kapirgáljuk le a koszt a szűrőről, vagy egy hagyományos porszívót használunk erre a feladatra.

Nem zavaró, de érdekes probléma, hogy a portartály helyén már az első takarítás után állt a por, ami azt jelenti, hogy a portartály nem illeszkedik rendesen a beszívó nyílásra, így az illesztésnél az erős szívómotor átszívja a por egy részét.
Nagyon pozitív, hogy a gyártó időnként szoftverfrissítéssel lepi meg a Neato tulajdonosokat, amiket mostmár nem csak Windows-zal, de OS X-szel is fel lehet telepíteni a robotra. Az évek során így nőtt a támogatott nyelvek sora (magyar értelemszerűen nincs köztük), a javult navigáció minősége, javítottak a szőnyegrojtok felismerésén és kezelésén, és bekerült a repertoárba a szpot mód is. Szintén így jelent meg az a funkció, aminek hála a dokkolón véletlenül meglökött robot visszaáll a helyére, és szofterfrissítéssel sikerült javítani a sarkok kezelésén is.

Igazságtalan lenne azt mondani, hogy a Neato az elmúlt 4 évben nem fejlesztett semmit. Bár kívülről nem látszik, de a robot belseje sok ponton megújult.

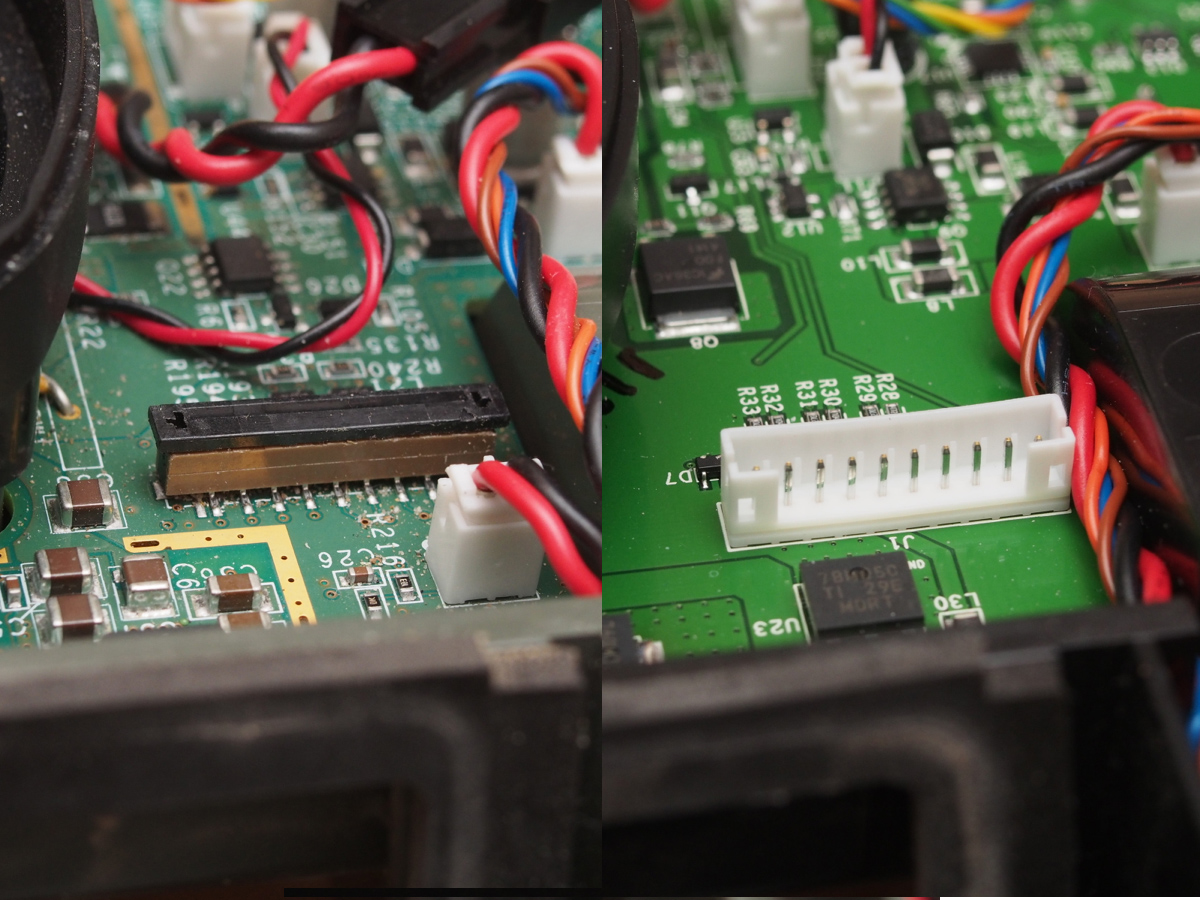


Mind a főpanelt, mind pedig a kezelőszervek paneljét újratervezték, a meghajtott kerekeket feszítő rugó csatlakozási pontjait (a rugó egyik végén) megerősítették (az első robotunkon négyből három rögzítés eltört), megfelelő csatlakozókat szereltek a paneleket összekötő, korábban forrasztott szalagkábelekre, megoldották, hogy a robot ne felejtse el lépten-nyomon a pontos időt és újragondolták a gumilapátos henger felépítését is. Amit még nem sikerült megoldaniuk az az akkumulátorkezelés, amiről picit fentebb már volt szó.






