
Samsung Navibot S SR8950 porszívó robot teszt
Felépítés
Nem szeretnék túlságosan belemenni a Samsung dizájnon keresztül történő piacszerzésébe, de azt észre kell vegyük, hogy a Samsung az összes többi ázsiai vállalatnál jobban megértette, hogy manapság a dizájn a termékek egyik legfontosabb jellemzője. A cég tévéi és okostelefonjai rendkívül jól néznek ki, és dizájn tekintetében a robotok sem maradnak le a többi terméktől: az új Navibot S sorozat tagjai szerintünk ma a legjobban kinéző háztartási robotok a piacon.

Persze a külső megítélése ízlés kérdése, de szerintünk a kínai robotok játéknak, az amerikai Roomba és Navibot modellek pedig ipari takarítógépeknek néznek ki az elegáns Navibot S robotok mellett. Az i-re a pontot a fényes külső és a színátmenetes festés teszi fel.

A korong alakú robot 35 cm-es átmérője megegyezik az előd ilyen irányú kiterjedésével, de a magasságot sikerült 1,3 cm-rel lecsökkenteni; 8 cm-es magasságával ma a Samsung Navibot S modellcsalád a legalacsonyabb teljes értékű robotporszívó a piacon.
A legtöbb robottal ellentétben az SR8950 nem rendelkezik benyomódó ütközés érzékelővel. Az ilyen eseményeket a robot gyorsulásmérővel érzékeli, de a robot alapvetően igyekszik elkerülni az ütközéseket. Az akadályok és a padló robot elejétől, oldalától és aljától mért távolságáról a készülék infravörös szenzorok felhasználásával tájékozódik, így általában tisztában van a falak, bútorok és lépcsők helyzetével is. A robot gumírozott külsejének hála az akadályok ütközés esetén sem sérülnek.

Az SR8950-re egyszerű, de informatív kezelőfelület került. Az érintésérzékeny felület három aktív területből áll: módválasztó gomb, start/stop gomb és dokkolás gomb. Mivel ezzel a három gombbal csak a leggyakrabban használt funkciók érhetők el, a robot teljes tudásának kiaknázásához a gyártó egy praktikus infravörös távirányítót is mellékel. A kezelőfelület kijelző része elsőre akár kicsit zavarosnak is tűnhet, de egyáltalán nem bonyolult. A legnagyobb részt az idő, a hibakódok és a töltés visszaigazolás megjelenítésére használt négy számjegy foglalja el. A számjegyek fölött láthatók a hét napjai (angolul rövidítve), amelyekre az időzítésnél lesz szükség. A normál működés során csak az időzített indulásnál beállított napok világítanak, az inaktív napok nem zavarják feleslegesen a felhasználót. A három működési mód ikonjai a számjegyek alatt sorakoznakt: Auto, Spot és Max. (Ezekről bővebben a következő oldalon lesz szó.) A számjegyektől balra egy három fokozatú akku töltöttség visszajelző, illetve a Turbo mód és a kosz érzékelő mód ikonja látható.

A kezelőfelület előtt található kamera a navigáció során kap szerepet. Folyamatosan figyeli a robot fölötti plafont, és visszajelzéssel szolgál a robot valós mozgásáról és furdulatairól. Korábban nagyon lelkesedtünk az ilyen megoldásokért, de a tapasztalatok alapján az ilyen kamerák sokkal kisebb jelentőséggel bírnak, mint ahogy azt a gyártók általában beállítják. Ennél a robotnál szükség van a kamera visszajelzéseire, de azért a navigáció enélkül is jól megoldható lenne.

A robotra fogantyú nem került, így felemeléséhez mindenképpen két kézre van szükség.





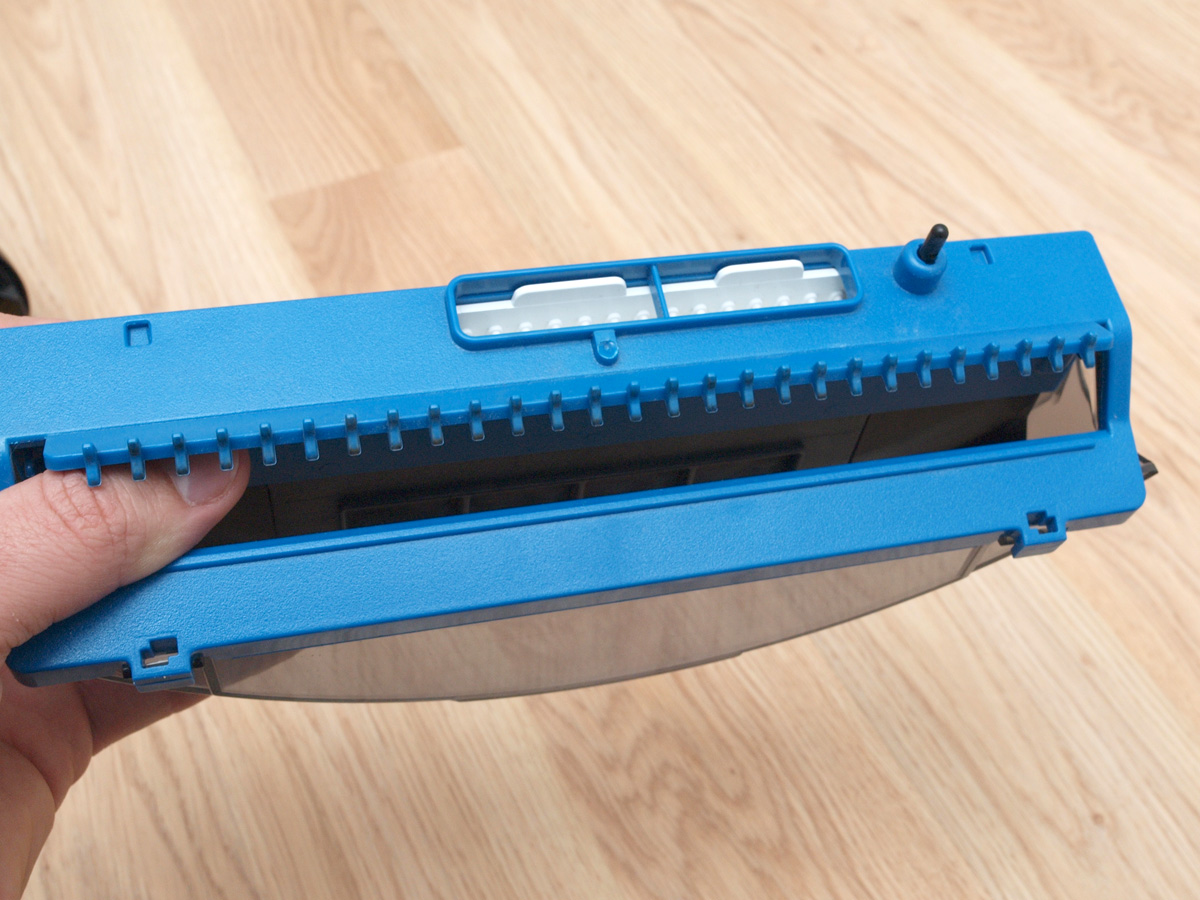
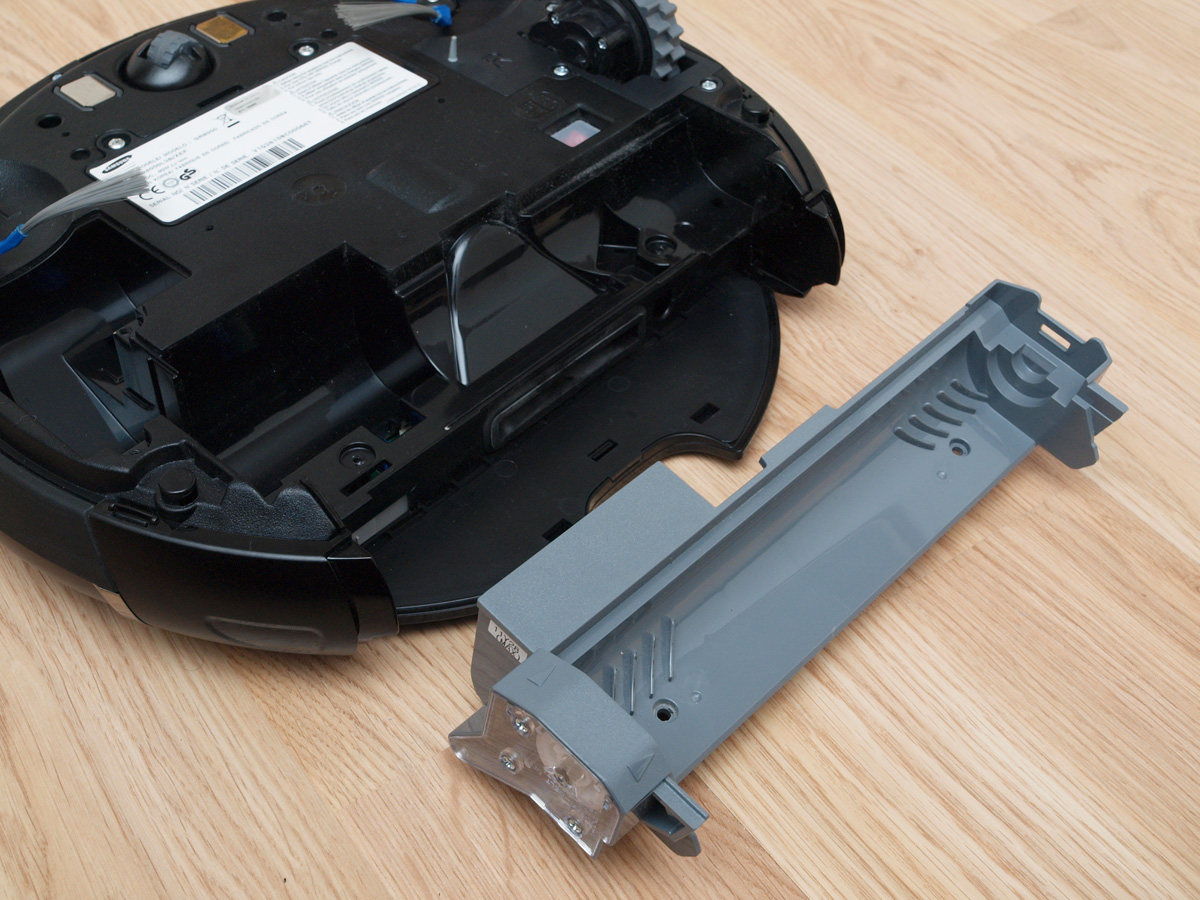
A Navibot S SR8950 portartálya a robot hátuljára került. A forma és az elrendezés nagyon hasonlít a Roomba robotokon használt megoldásra, de a technológia nagyon eltérő. Amíg a Roomba portartálya tartalmazza a porszívó motort is, addig a Samsung ezt az alkatrészt fixen a robot belsejébe rejtette. Ez némileg leegyszerűsíti a dizájnerek dolgát, és elvileg nagyobb portartály építését is lehetővé teszi, de megnehezíti a vákuum motorral kapcsolatos tervezési hibák javítását (az iRobot könnyen növelheti a szívóerőt egy nagyobb motort tartalmazó tartály bemutatásával). A szemét és a piszkos levegő a kefék felől áramlik a tartály 0,3 literes alsó blokkjában. A tartály felső részét az alsótól egy mosható, nagy lyukú szűrő választja el, ami megakadályozza, hogy a nagyobb szemétdarabok eltorlaszolják a fenti részben lév HEPA szűrőt. A szívóerő a robot fő egységéből a portartály felső részén lévő nyíláson keresztül érkezik.

Érdekes módon az SR8950 nem rendelkezik légkiömlő nyílással, ahol a beszívott levegő távozhatna. Elvileg a beszívott levegőnek valahol távoznia kellene, de a készüléken nem találunk egyetlen egy ilyen célra kialakított nyílást sem. A trükkre a következő oldalon fogunk rávilágítani.

A portartály mögött egy elhúzható ajtóval takart mélyedésben egy öt érintkezővel rendelkező csatlakozó lapul, aminek a funkciója nem ismert.




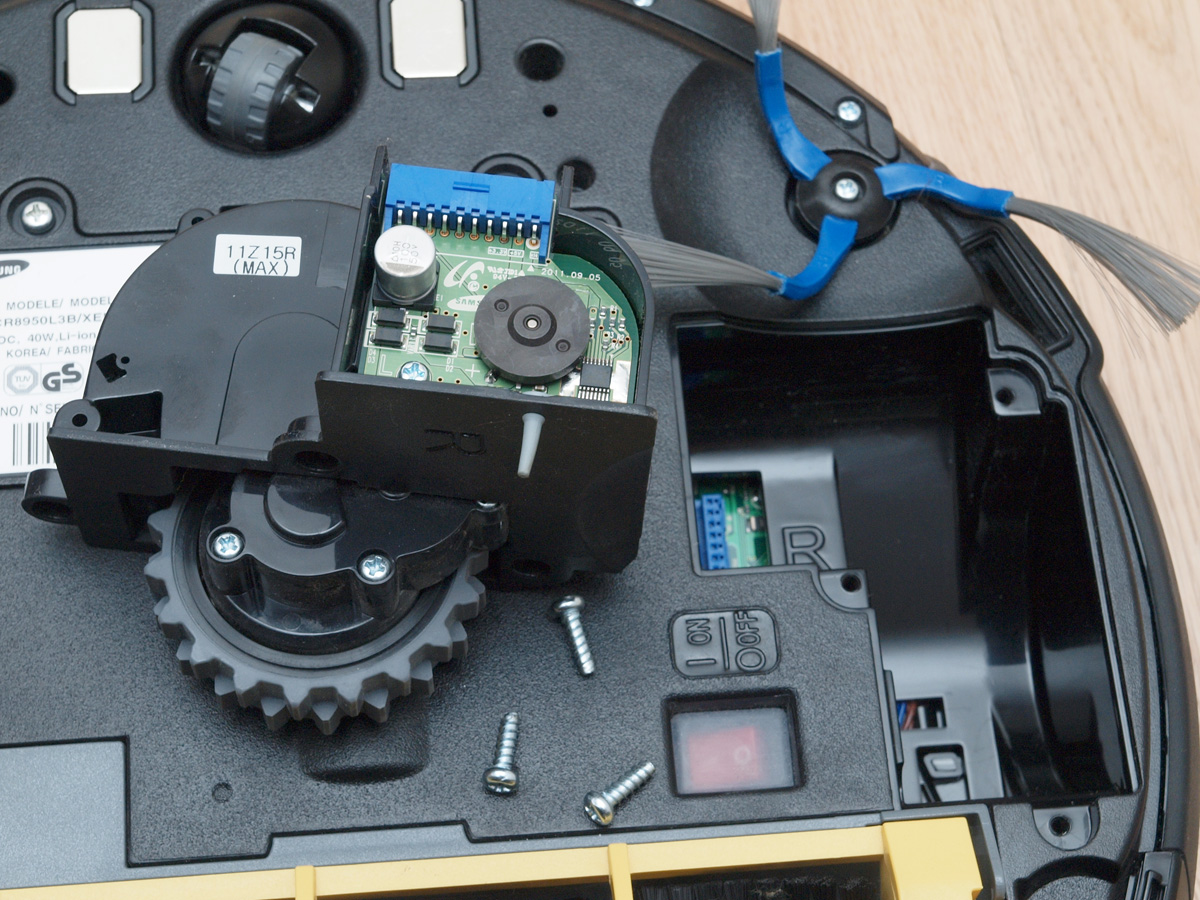
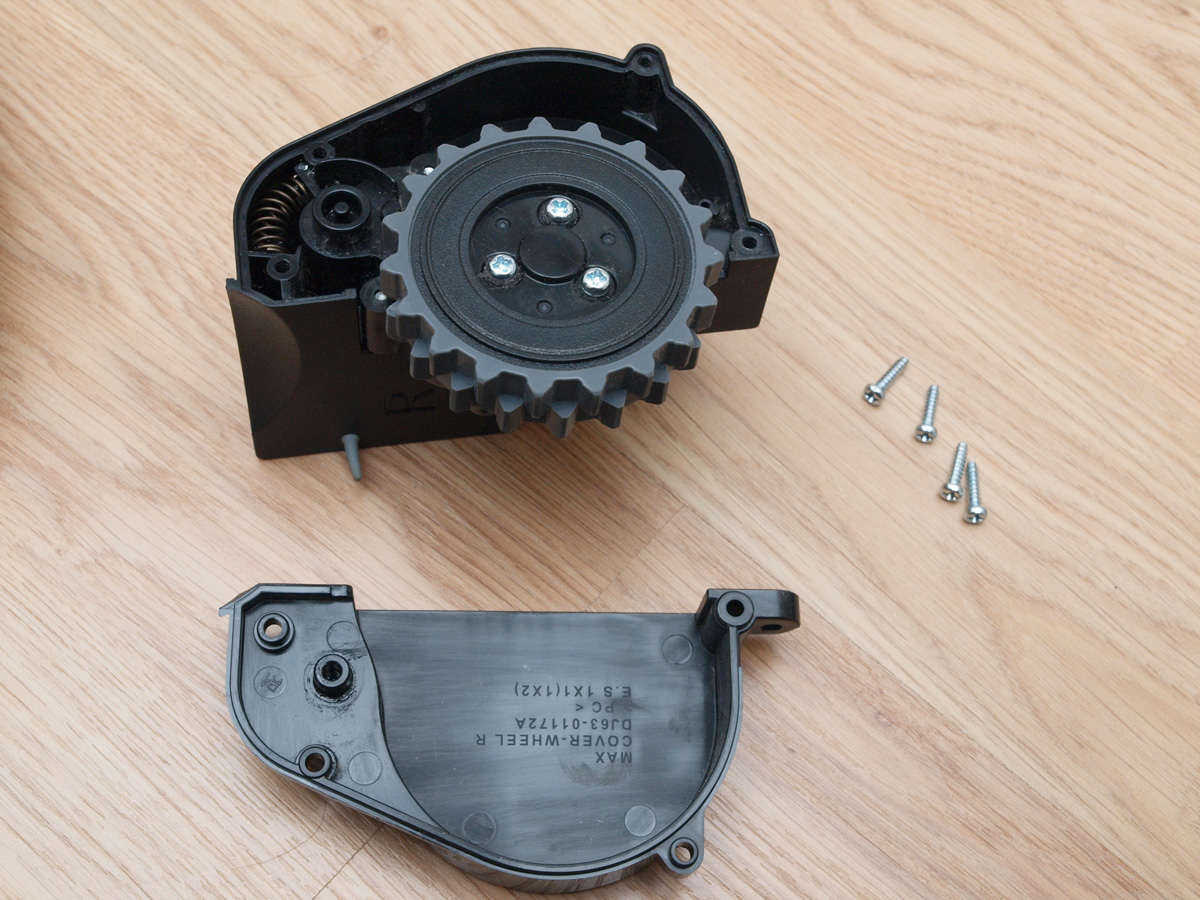
A robot alján semmi különös nem látható. A Navibotot a szokásos módon két nagyobb kerék hajtja, amelyek eltérő fordulatszáma felel a robot fordulásáért. A harmadik, kitámasztó kerék egy függőleges tengely mentén 360 fokban körbe tud fordulni, de a Roomba robotokkal ellentétben a Navibot roboton a kerék nem szolgáltat adatot a robot elmozdulásáról. Az önálló egységet képező meghajtott kerekek meghibásodás esetén egy mozdulattal kiemelhetők és kicserélhetők, ami rendkívüli módon megkönnyíti a készülék javítását.
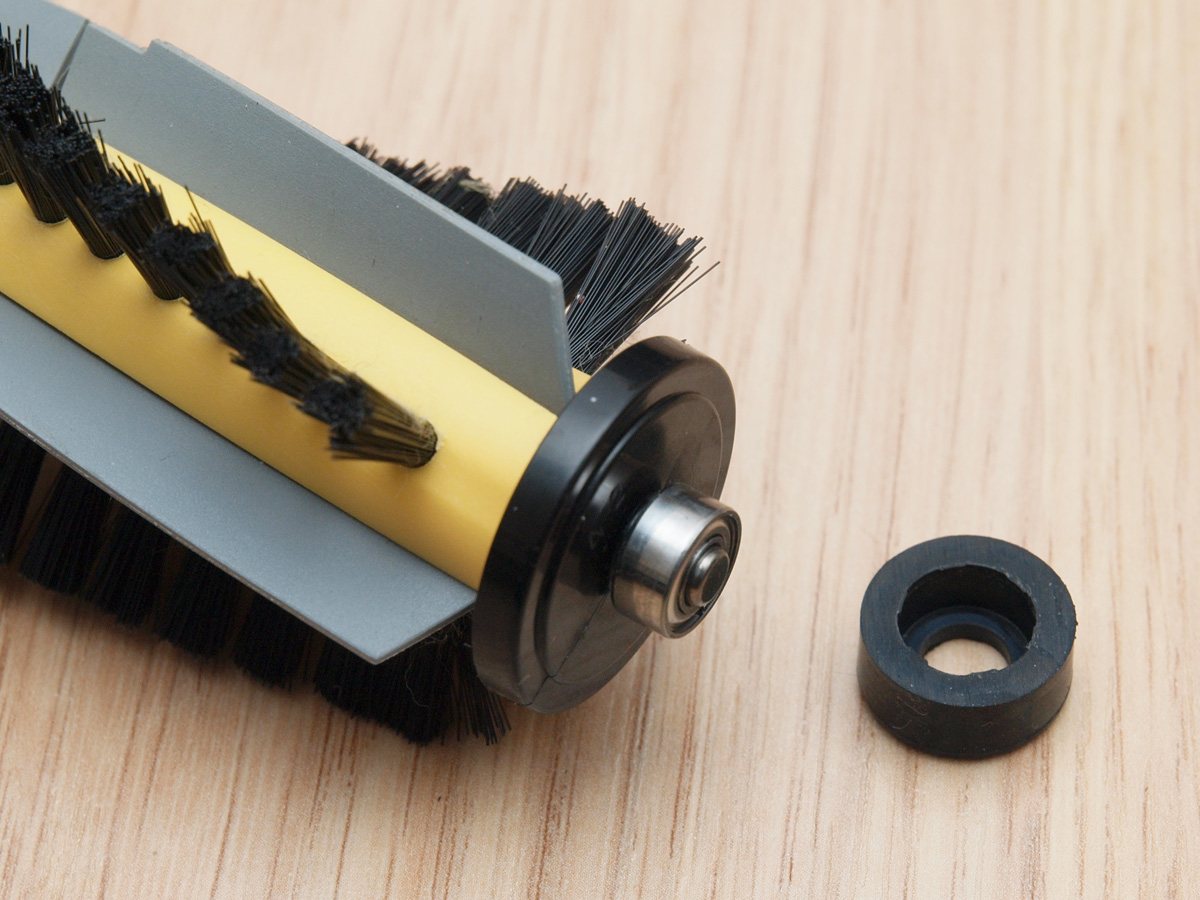
A tisztító egység a kerékhez hasonlóan szintén egyben kiemelhető. A robot egyetlen hosszú kefés hengerrel takarít, amin a kefesorok mellett gumilapátok is vannak. A hengert szíjhajtás forgatja, amit a mérnökök egy egyik oldalán átlátszó házba rejtettek, így az oda bejutó és ott felhalmozódó kosz mennyisége kívülről is jól látható. A kefe egyébként 4 cm-rel hosszabb, mint az előd modellben, így a tisztítási szélesség 16 cm-ről 20 cm-re nőtt.
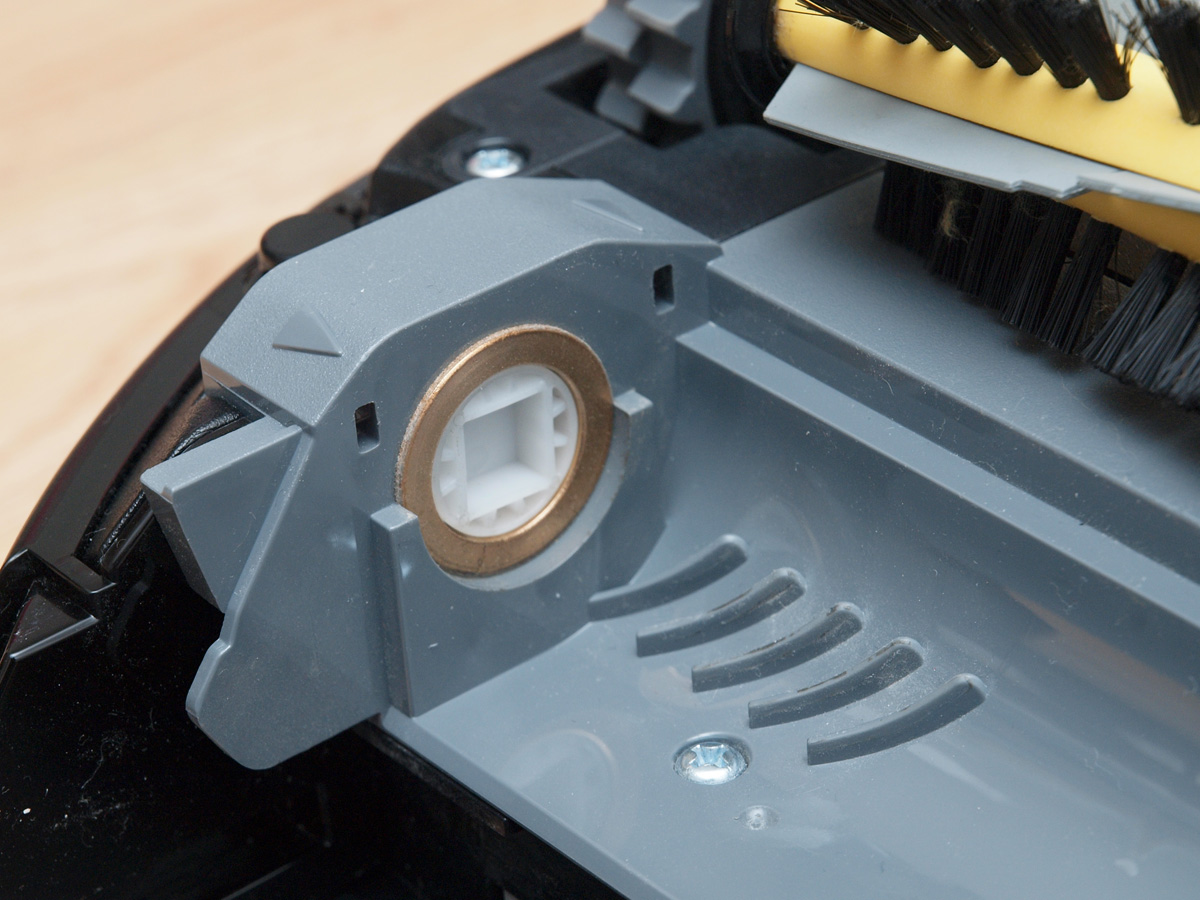



A takarítási sáv szélességét a két oldalkefe növeli, elsősorban kemény padlón való használat során. A kefék a robot mellől is a robot alá, a kefés henger illetve a vákuum irányába söprik a koszt és a port, így növelve a takarítás hatékonyságát a falak és bútorok mentén.



Furcsa módon a majdnem teljesen új roboton az egyik kefe egyik karja már fityegett mikor hozzánk érkezett, ami gyenge anyagminőségre utal.

A Samsung Navibot S SR8950 áramellátásáról egy 14,4V-os Li-ion akkumulátor gondoskodik, ami akár a felhasználó által is cserélhető módon került a robotba. Az akkumulátort rejtő mélyedésben található még egy USB csatlakozó, ami valószínűleg szervizelésnél kap szerepet. Az eddig megjelent Samsung robotokhoz a gyártó legjobb tudomásunk szerint nem adott még ki szoftveres frissítést, ezért egyelőre nem feltételezzük, hogy ez a csatlakozó a robot belső szoftverének a felhasználó általi frissítésére szolgálna.


A robot orrán lévő apró tüske a virtuális falak infravörös jeleinek a vevője, míg a távirányító által kiadott jeleket a robot elején egy, az oldalán pedig két vevőegység fogadja.

A Navibot S SR8950 mellé a Samsung egy kompakt dokkoló állomást mellékel, ami a robot automatikus töltését biztosítja. Az érintkezőket a gyártó a dokkolóból kinyúló tálcára helyezte, az erre ráfutó robot alján lévő érintkezők ehhez illeszkedve hozzák létre a töltéshez szükséges kapcsolatot (hasonlóan a Roomba robotokhoz). A dokkoló tápkábelének a használaton kívüli része a dokkoló hátlapján kialakított fülekre tekerhető. A dokkoló tetején lévő két LED a dokkoló működéséről és a töltésről ad visszajelzést. (Nagyon erős a fényük, ezért sötétben zavaróak lehetnek.)


Az infravörös jelekkel működő távirányító a külsejét tekintve keveset változott az előző generáció óta. A gombok száma nem, de a velük elérhető funkciók mennyisége megnőtt. A legtöbb gomb funkciója teljesen egyértelmű, az egyetlen trükköt a Timer/Weekly (Időzítő/Heti) feliratú gomb használata rejti. Egyszeri gombnyomással a Timer funkció érhető el, amivel a következő (egyszeri) indítás időpontja állítható be. A heti rutin programozásának eléréséhez a gombot legalább három másodpercig kell lenyomva tartani.

A robot mellé adott két virtuális fal a korábbi verzióhoz képest kisebb, kecsesebb lett, de C méretű akkumulátorok helyett D méretűt igényelnek. A fal tetején lévő kiemelkedés egyszerre szolgál bekapcsoló gombként és a robottal való kommunikációt biztosító optikai kapuként.







